
Прорабатывая дальнейшее развитие проекта, решил попробовать переделать опорные источники. Предыдущая версия основывалась на референсной схеме TI с зеркалом, на базе встроенной в ЦАП R+R цепи.

Оно в принципе работает, но ее дрейф мне не нравится. А поскольку внешнюю зеркалирующую цепь R+R я не хочу, так как с ней много мороки с подбором резисторов по ТКС, то решил двигаться в другом направлении, и применить доселе не виданный концепт с двумя интегральными стабилитронами. Один из них будет создавать опору положительной полярности, а второй отрицательной полярности.

Да, как вы могли заметить, мне наконец-то скоро приедут из Элитана новые интегральные стабилитроны ADR1399KEZ  Главная отличительная черта которого значительно меньший низкочастотный шум.
Главная отличительная черта которого значительно меньший низкочастотный шум.
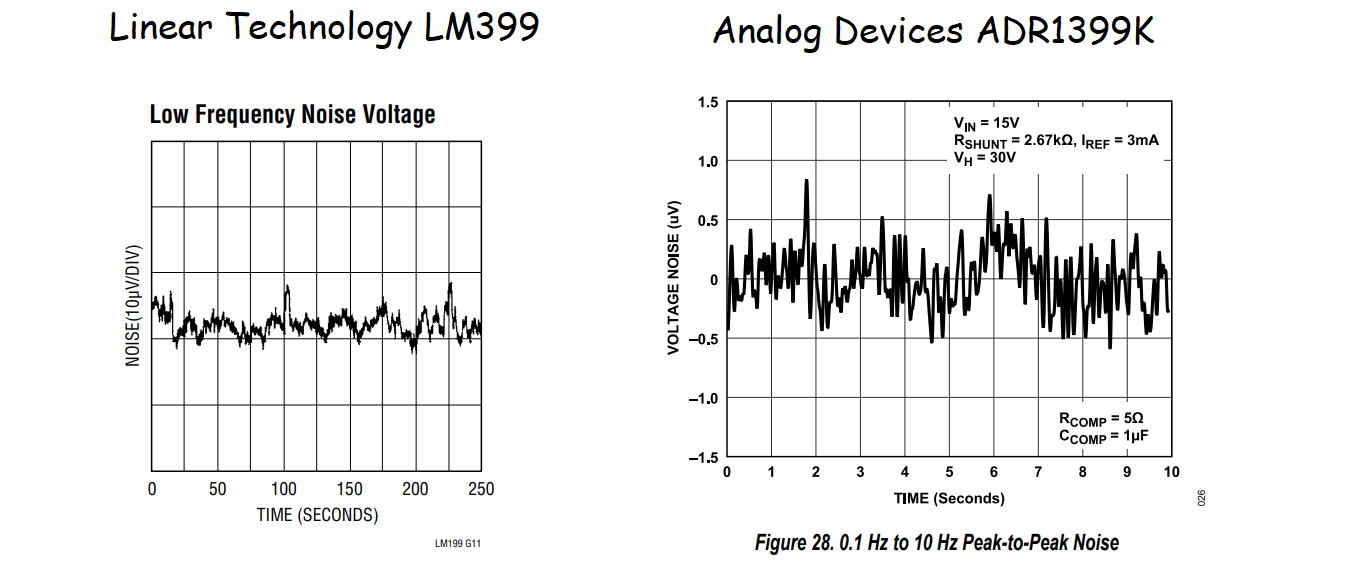
В то время, когда для LM399 НЧ шум с легкостью доходил до 4-5 мкВ от пика до пика и более, у ADR1399K заявленный шум должен составлять около 1.4 мкВ от пика до пика. Напомню, что 10 мкВ шума на скорости ЛИН 10 мВ/c, это 0.1% AC составляющей в выходном DC токе.
По случаю нового стабилитрона я решил заморочится с его обвязкой, и спроектировать новый драйвер питания интегральных стабилитронов:

Отличительной чертой данного драйвера, является гарантированная установка начальных условий запуска интегрального стабилитрона. В отличии от прошлой редакции, добавлен диод D1, который не даст защелкнуться драйверу на отрицательной полярности. А это проблема, так как питание ОУ двухполярное, и такое защелкивание может произойти при очень большом сопротивлении подтяжки, которая обычно составляет 100…1000 кОм. Маленькой подтяжку на плюс питания обычно не ставят, т.к. она внесет в ток стабилитрона зависимость от питающего напряжения. Но я решил и эту проблему исправить, переставив подтяжку с контакта стабилитрона на выход ОУ. При предлагаемом включении, ток подтяжки никак не будет влиять на ток стабилитрона, но при этом она будет гарантированно устанавливать положительную полярность и корректно запускать ОУ в момент включения.
Пришлось так-же заморочится, и применить активный драйвер земли стабилитронов, чтобы полностью устранить негативные эффекты от протекания тока по дорожкам земли.

Такой драйвер с кельвиновским подключением не только уберет проблемы связанные с сопротивлением и ТКС землянной дорожки, но и позволит развести сигнальную землю всей платы ЦАП таким образом, что ток по ней не будет протекать, и тем самым уйдет проблема перекоса потенциала земли.
Генерация обоих полярностей с помощью интегральных стабилитронов, без каких либо резистивных элеменетов, по идее должна жесточайшим образом пригвоздить обе рельсы опорного питания, и проблема плавающей рельсы -7V должна полностью исчезнуть.
А освободив R+R цепь DAC, ее можно использовать для другого не менее важного дела – выравнивание токов входов буфера U4.

А они, токи входов, у нового выходного буфера OPA211 уже довольно приличные, десятки наноампер в условиях прогрева, и они могут сместить выходное напряжение на десятки ppm.