
Я немного затянул с съемками видео по итогам года, потому-что отсыпался весь НГ и пилил блок времени, о чем сейчас и расскажу. А вот уже потом пойду снимать видео.

Спустя несколько лет облизывания на модуль U-BLOX LEA-M8F, наконец-то сложились все необходимые условия:
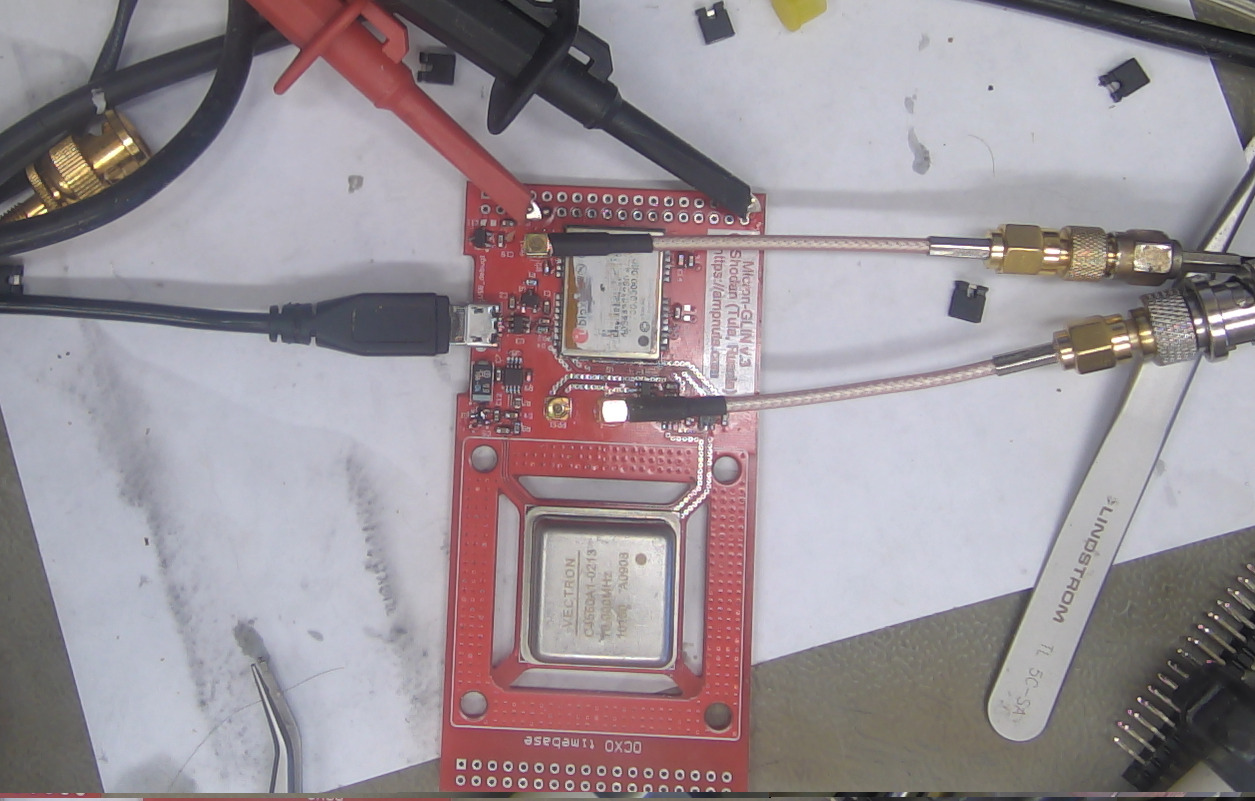
- Он стал легко доступен за дешево на АлиЭкспресс. (китаец присылает кусок платы с модулем, нежно выпиленный болгаркой)

- Я таки созрел разработать на его базе блок времени, и антенну к нему.
- Появился хорошо подходящий под него проект.
Особенности этого модуля я описывал ранее, повторюсь: Его главное магическое свойство – способность дисциплинировать внешние источники опорных частот, при минимальной обвязке. Другими словами, он с помощью ЦАП может настраивать кварцевые и прочие генераторы, управляемые напряжением.
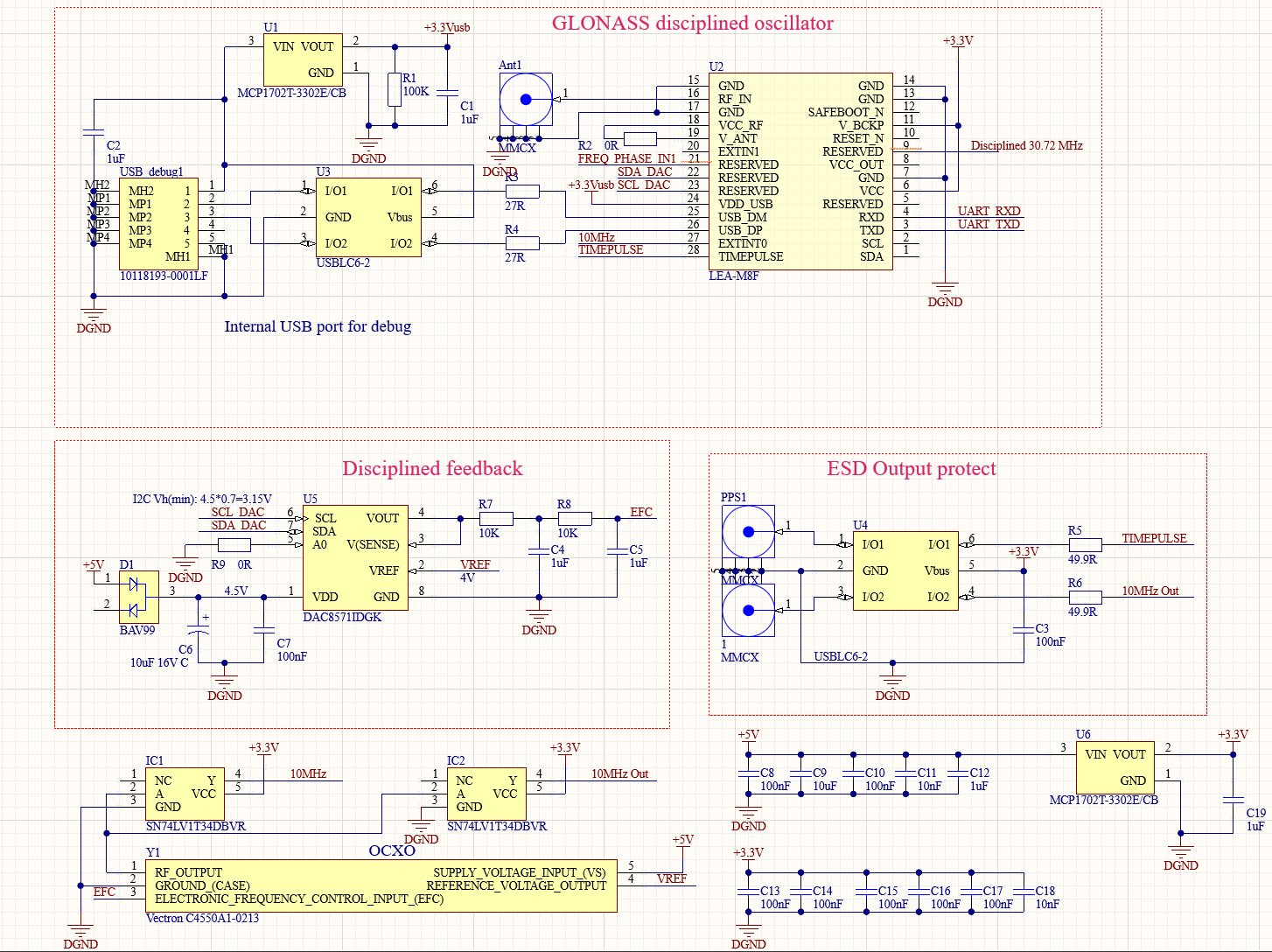
Но я немного усложнил свою задачу, и решил, что он должен давать мне импортозамещённое время ГЛОНАСС(GLO)+Beidou(BDS), поскольку у меня уже есть система на базе хай-грейд оборудования от Hewlett Packard и Symmetricom, синтезирующая время и частоту по системе NavStar(GPS).
Почему выбор пал на эти две, тут все просто. ГЛОНАСС – ну потому-что он наш, и за его работой наши военные активно следят, холят его и лелеют. (только в прошлом только году заменили два спутника из 24 на орбите на новые)
А вот с Бейду тут все интереснее, она конечно тоже считается глобальной навигационной системой, безусловно! НО! Наклонение орбит у нее составлены таким образом, чтобы над Азией плотность спутников была наивысшей.
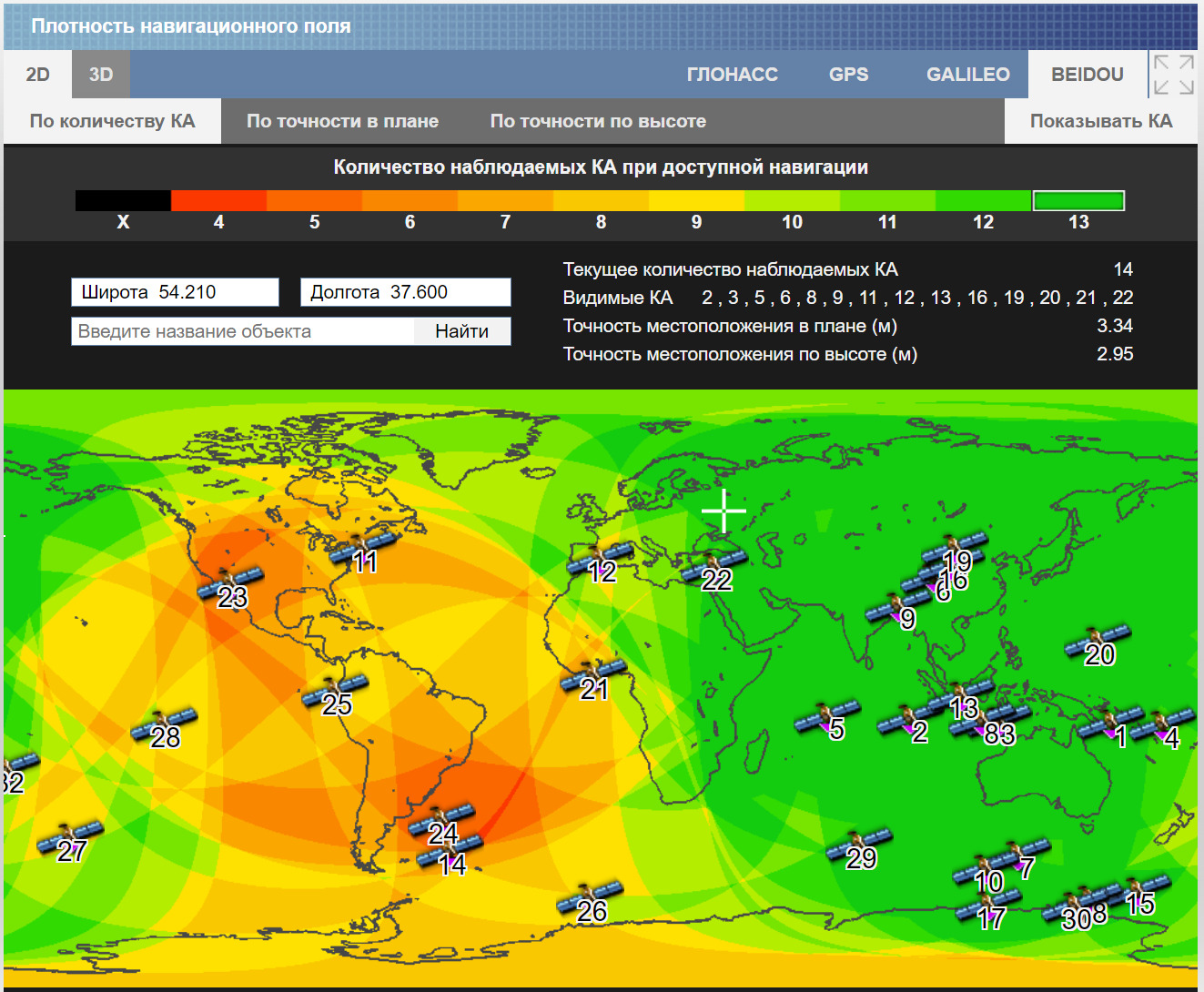
Но при расположении приемника в центральной части России, это будет преимуществом, только если антенна видит восточную…юго-восточную часть неба. (мне повезло)
В отличии от Галилео, Навстара, и ГЛОНАССа, орбиты которых выстроены таким образом, чтобы обеспечить более-менее равномерную плотность видимых спутников по всей планете.
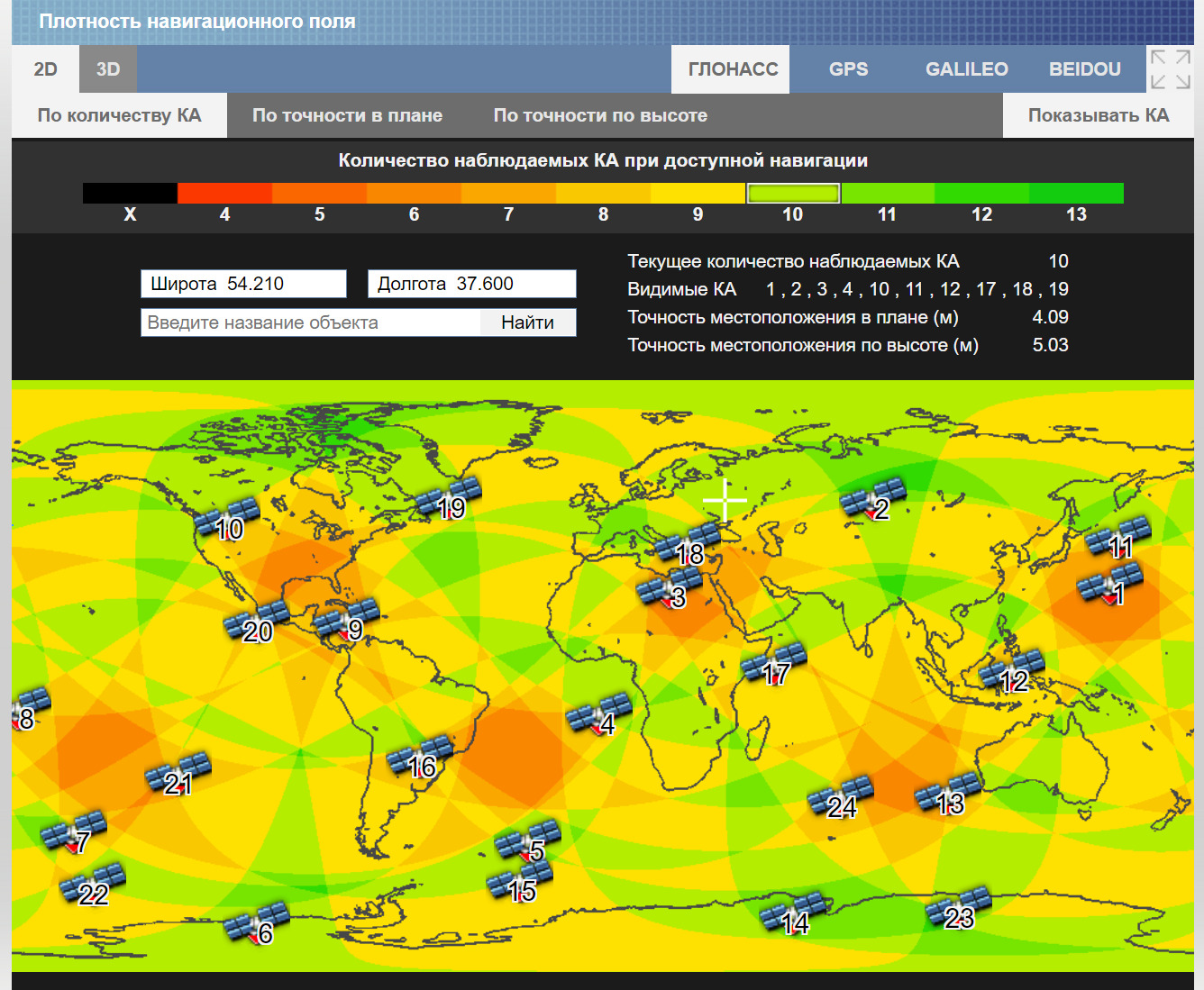
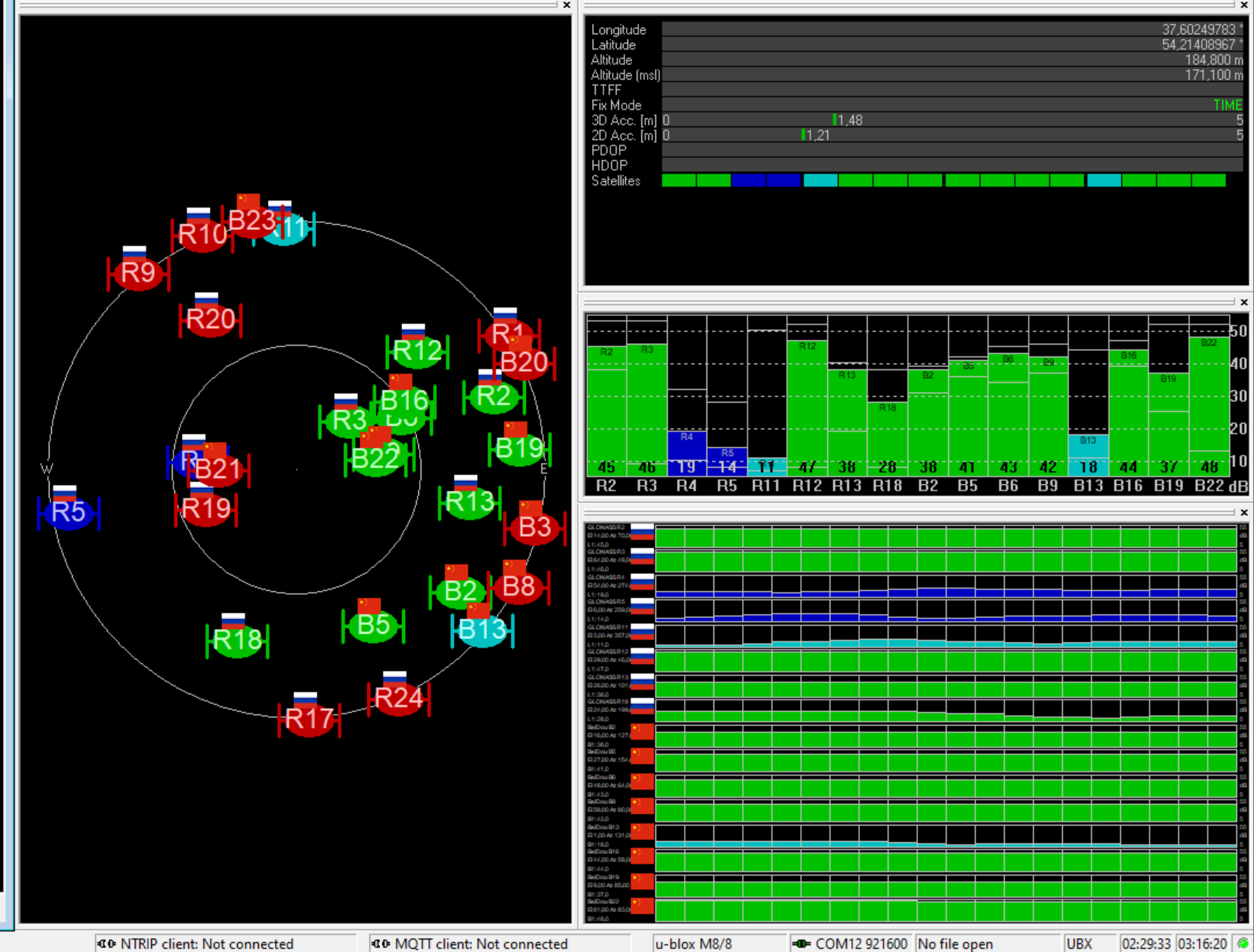
В паре-же они дают на территории РФ поистине ошеломляющую плотность покрытия, при которой, даже если антенна видит пол неба(как моя, которой дом закрывает обзор), в решении навигационной задачи участвуют(почти всегда) более 10 спутников.
Тут сразу нужно сделать оговорку: Хоть основное применение модулей LEA-M8F – синтез времени и частоты, классическую навигационную задачу они тоже умеют решать. Однако, рекомендуется переводить эти модули в режим Survay-in и затем в режим Fixed, при котором координаты антенны фиксируются, и решение полной навигационной задачи прекращается. Ведь обычно, работа таких модулей это удел стационарных приборов, с фиксированным расположением антенны. Это позволяет решать ограниченную навигационную задачу, вычисляя только репер времени. Благодаря чему становится возможным не терять “лок” спутниковой группировки в условиях плохого приема при малом количестве видимых спутников и увеличить точность и стабильность репера времени. Так-же кстати работает и GPSDO от Hewlett Packard.
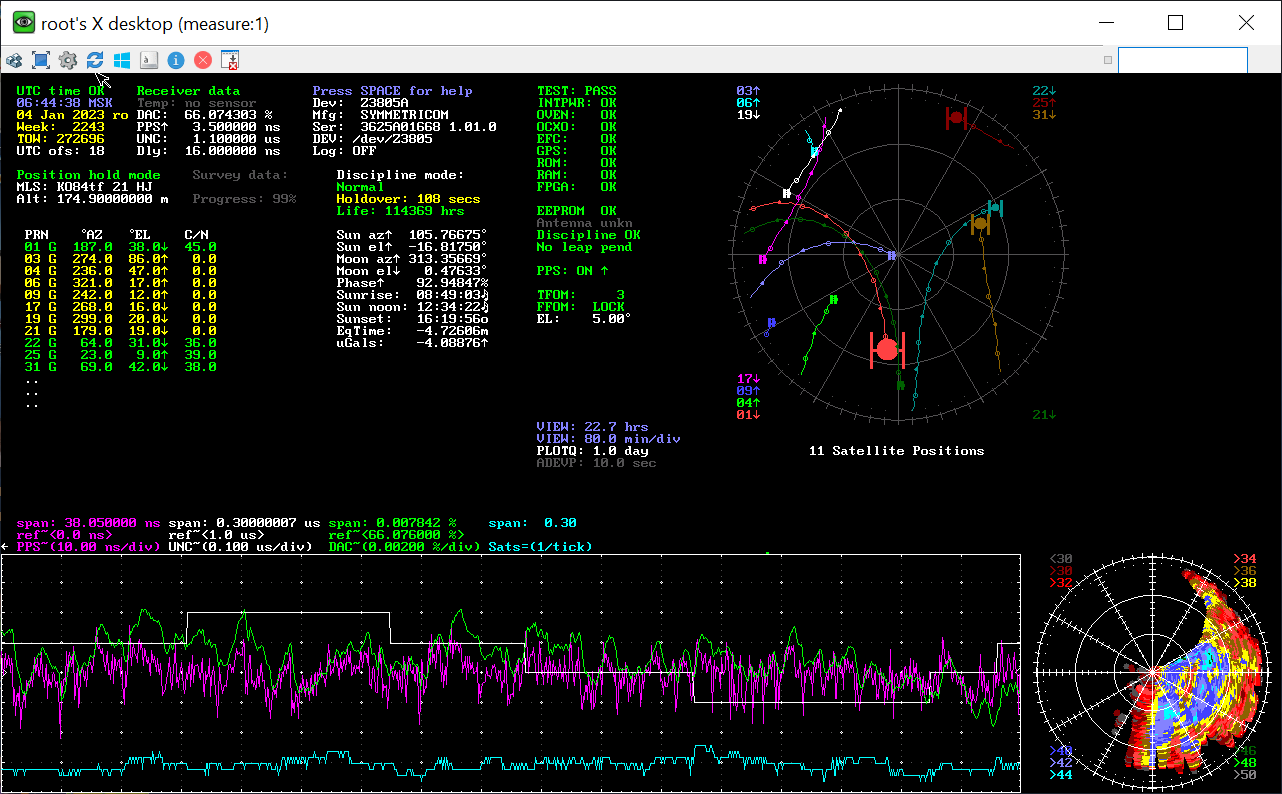
Если посмотреть на работу старенького Хюлита, то в том-же место-расположении он видит 3-6 спутников NavStar. Вот к примеру сейчас 4 спутника в локе.
Да и несмотря на фирменную антенну от Symmetricom и просто идельный СВЧ кабель, карта плотности сигнала не блещет высокими уровнями сигнала.
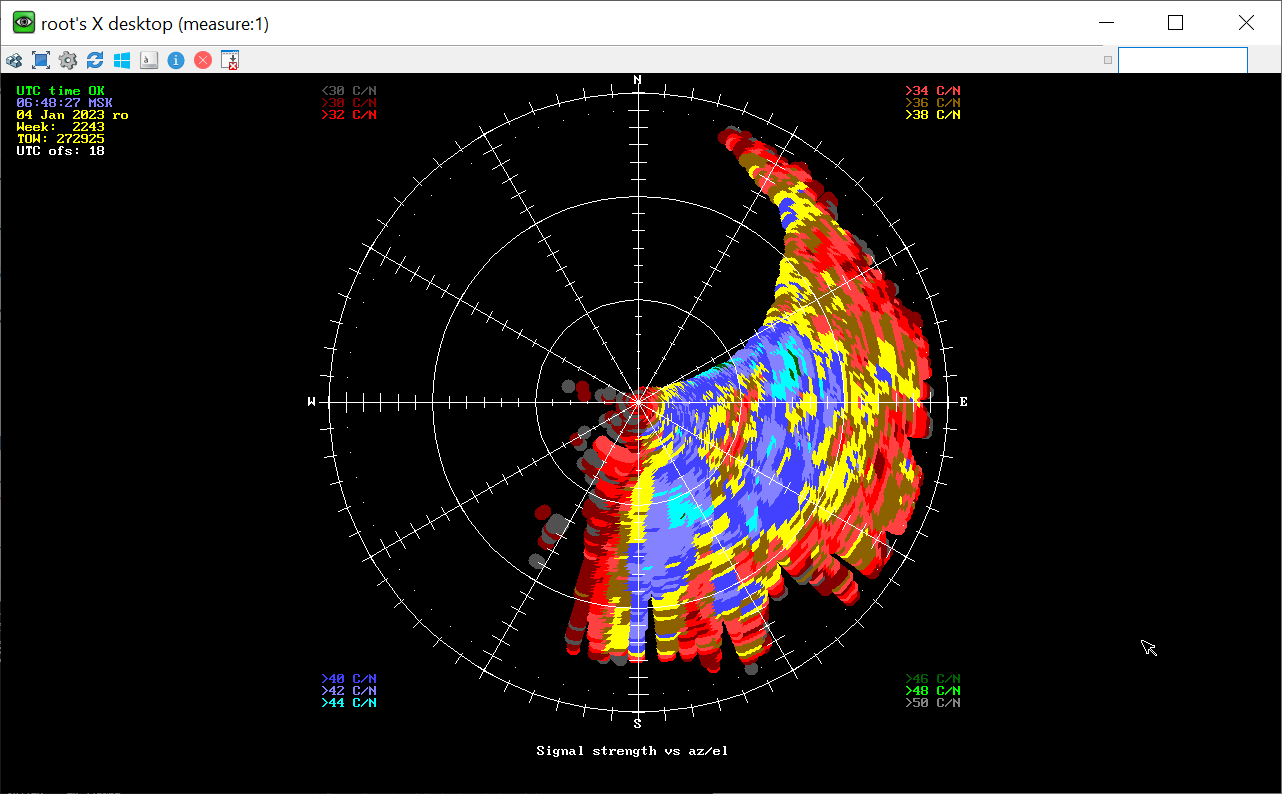
А все по тому, что чувствительность старых GPS модулей от Furuno и Motorola была не высокой. Современные модули U-Blox 8-ой серии показывают значительно лучшие результаты по карте приема
Более того, если старенькие приемники Furuno могли использовать спутник при сигнале с соотношением Carrier/Noise 30+ dB, то новый U-Blox M8 может использовать спутник уже при Carrier/Noise 10+ dB. По этому, я часто наблюдаю, что в решении навигационной задачи учувствуют даже спутники находящиеся не в прямой видимости, а за домом.
Это в купе с двумя аналоговыми фронтендами, позволяет добиться значительно лучших результатов по качеству “лока”. Я ожидаю, что в то время как старенький GPSDO от Hewlett Packard эпизодически терял лок, и переходил в режим автономного удержания генератора(Holdover), прекращая его коррекцию по спутникам. То в это время новый модуль на базе U-Blox LEA-M8F не должен переходить в автономку, ни при каких вообще условиях.
Но собственно думаю ждете Вы не этого… А того что я сейчас устрою баттл GPSDO vs “ГЛОНАСС+Beidou”. Ну….
Первые-же исследования показали, что прошивка U-Blox LEA-M8F сделана на скорою руку, и его применение с высокостабильными внешними термостатированными кварцами с SC-срезом видимо не планировалось разработчиком, и вот почему: программный буфер усреднения, для петли обратной связи очень маленький, по этому подстройка частоты кварца проходит довольно большими смещениями, образуя резкие скачки до ±0.5ppb, что в результате серьезно ухудшает общую шумовую картину, и аплитуда шума высококачественного VСOCXO растет с десятых долей ppb, до вполне ощутимых ±1.7ppb на пиках.
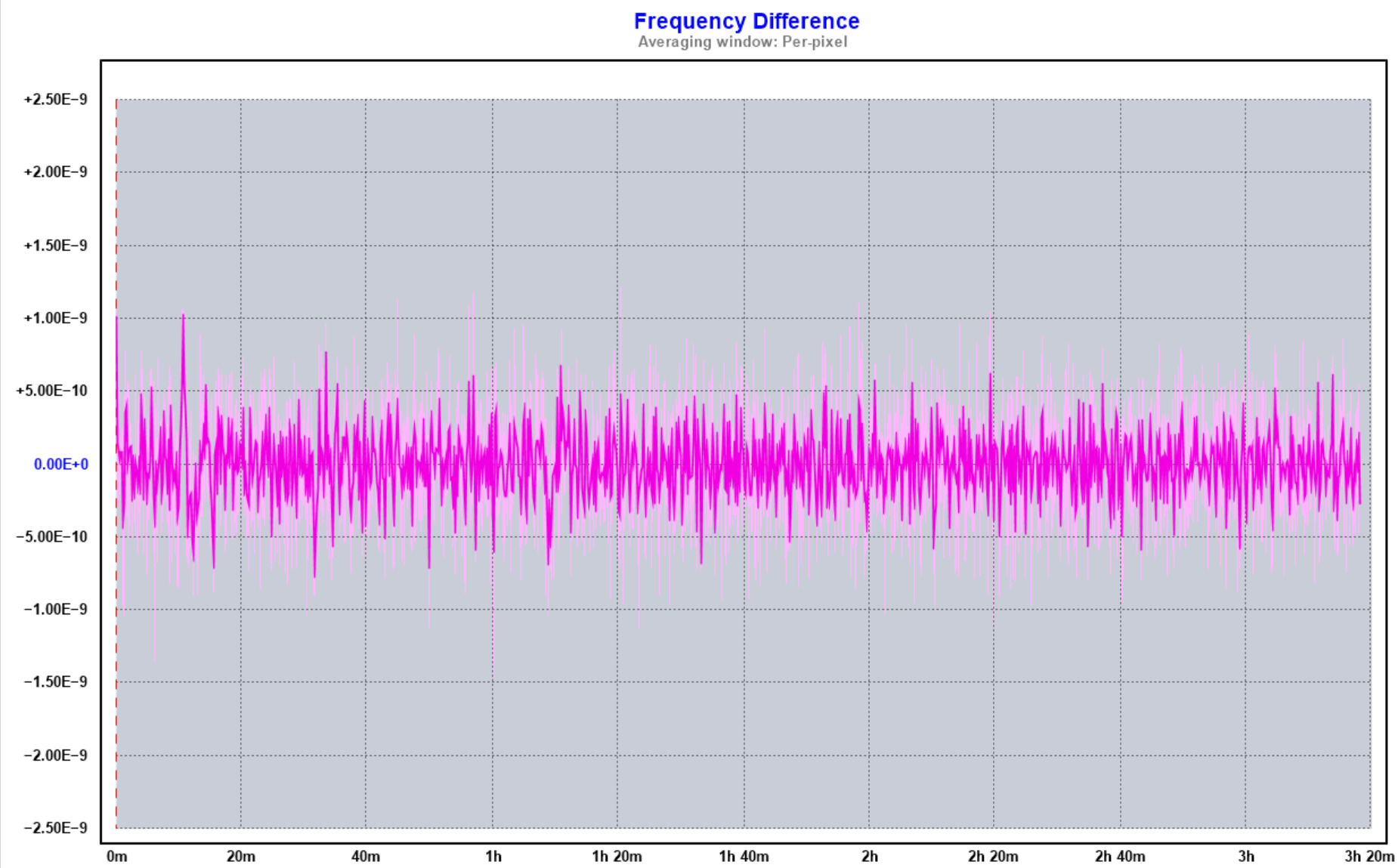
Что образовывает мощный такой горб на графике девиации Алана, в интервале 1…100 сек., которого раньше не было.
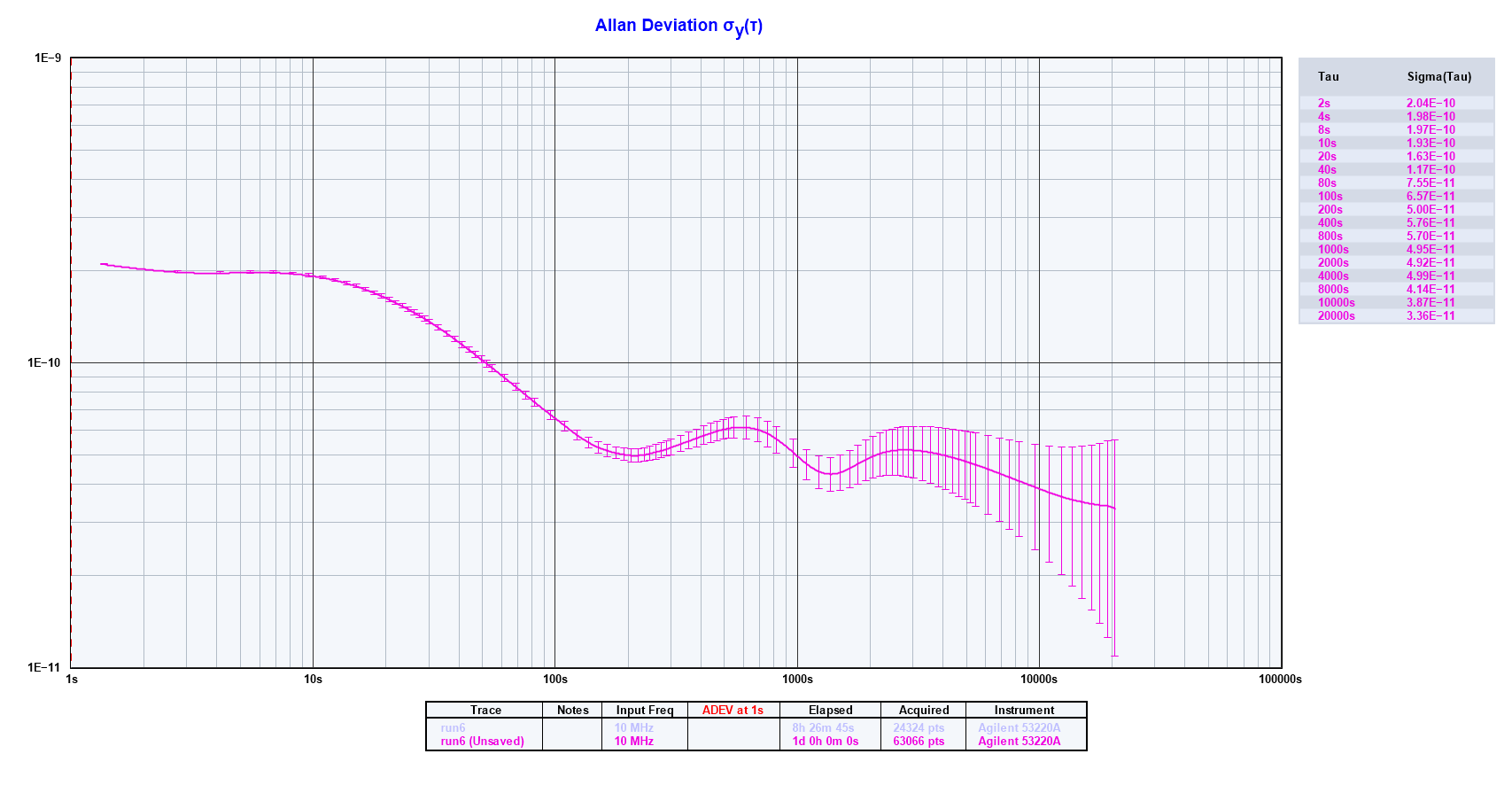
В ключевом для работы устройства секторе 1….1000 сек, особой стабильностью он явно не блещет, но этого должно быть достаточно. Однако, если сравнить с прошлым графиком, который я снимал без дисциплинирования в прошлом материале, то видно, что долгосрочная стабильность была явно сильно хуже. А значит настройка этого блока не потребуется.
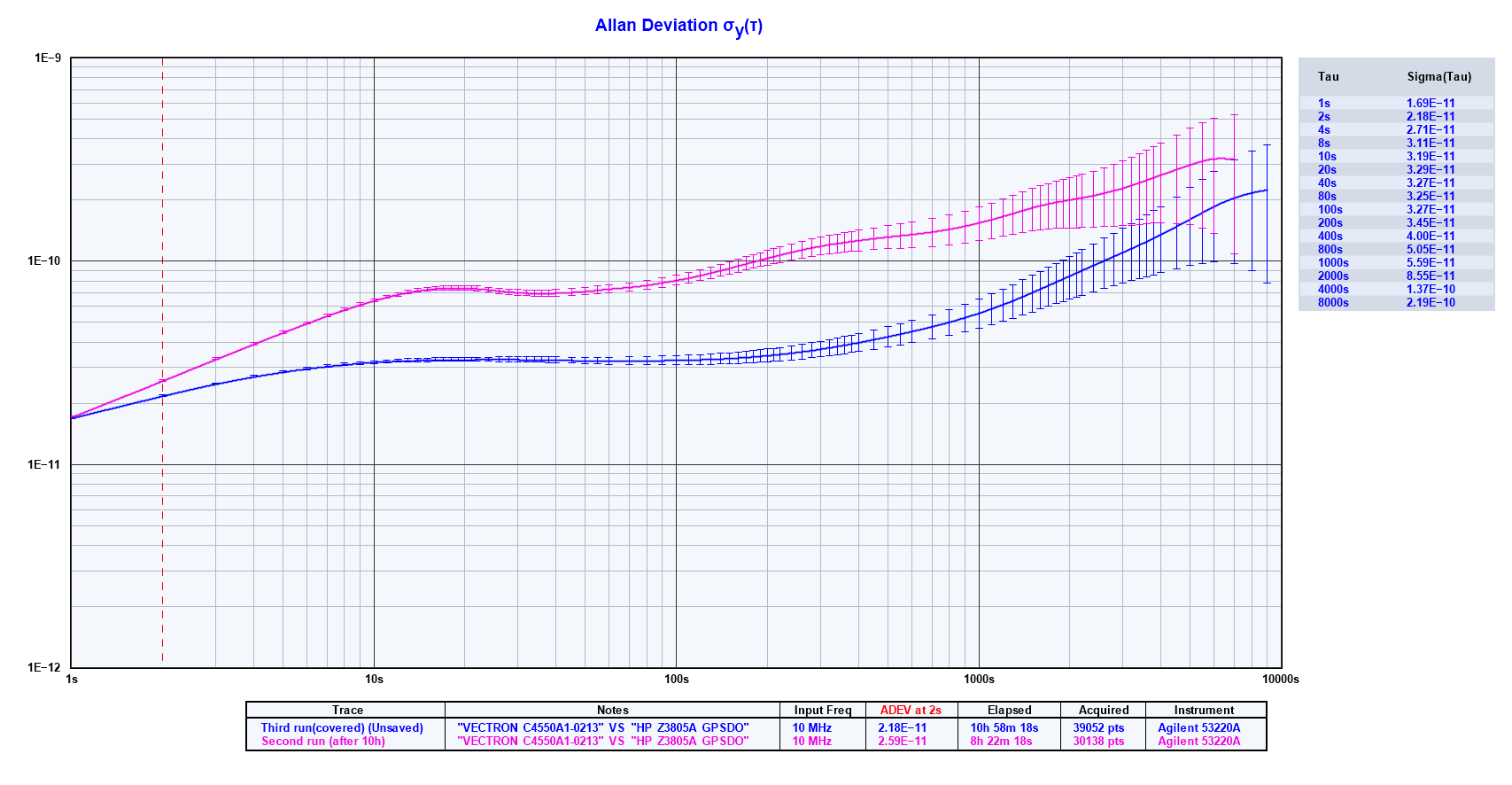
Это и есть эффект дисциплинированния кварца по спутникам, когда страдает краткосрочная стабильность, потому-что любой даже самый-самый лучший алгоритм коррекции сколько-то шума да обязательно добавит, но зато среднесрочная(температурная и т.п.) нестабильность, и долгосрочная(старение) нестабильности начинают стремится к стабильностям атомных часов на спутниках.
Но поскольку U-Blox алгоритм уебали очень сильно, то сравнивать этот модуль с классическим GPSDO HP Z3805 даже и смысла нет, он в области 0….1000 сек не дотягивает даже и близко. Он получается по своим параметрам даже хуже GPSDO BG7TBL.
Эпизодически алгоритму “сносит крышу” и он начинает дрифтить.
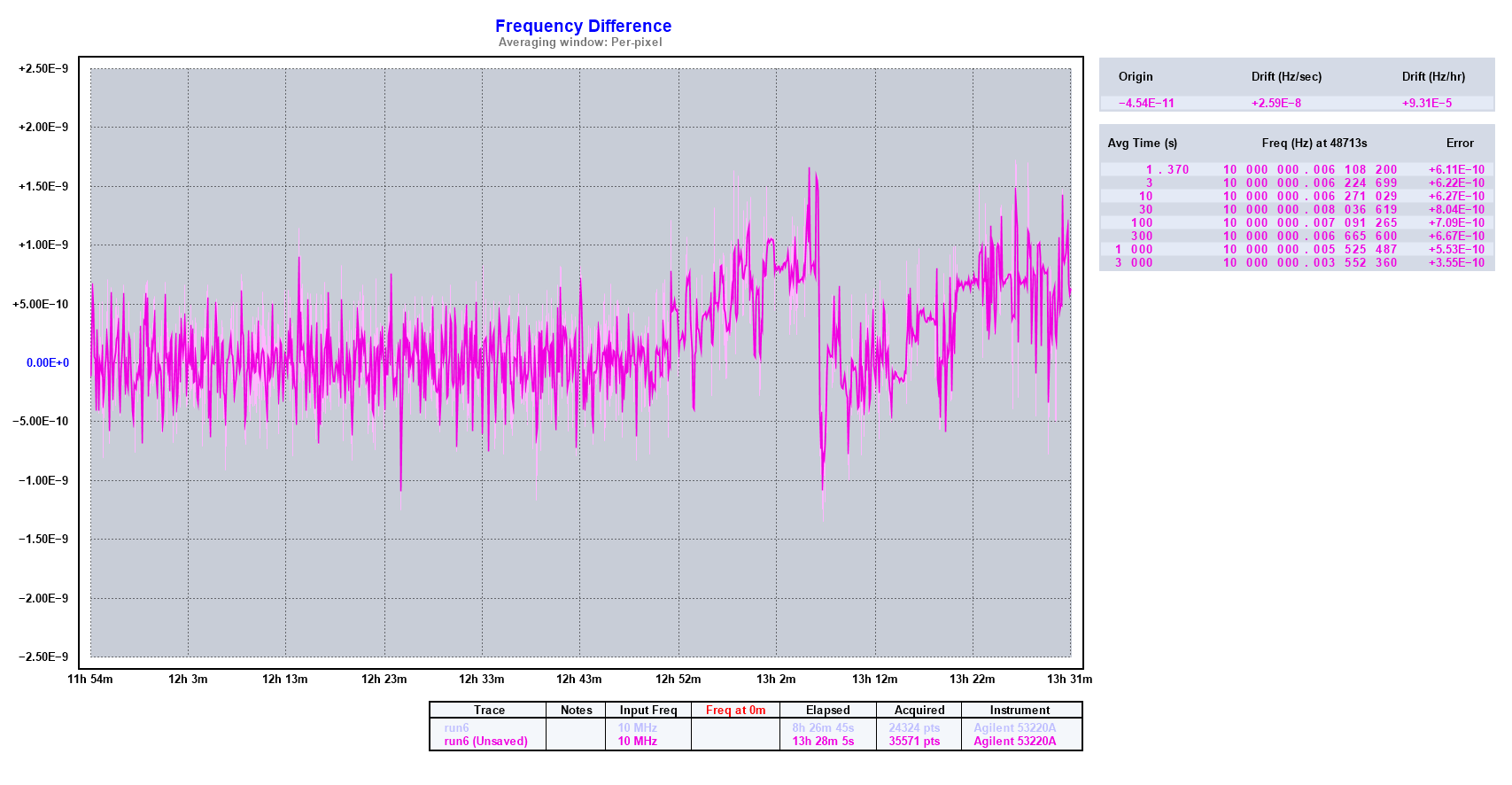
Но ничего критичного, за заявленный придел 5ppb частота не выходит.
Что важно! Он полностью выполняет требуемую для калибратора задачу, он заменяет подстроечный резистор в старой версии платы, и обеспечивает источник частоты с гарантированной стабильностью и точностью лучше 5 ppb. А благодаря обширной само-диагностике обеспечивается и повышенный контроль работы всего модуля. Что недостижимо ни для XO ни для TCXO ни даже для ни для дешевых OCXO. Другими словами, его не надо настраивать, он настраивает себя сам. Его не надо диагностировать, он диагностирует себя сам и выдает в МК расширенную статистику по работе дисциплинируемого OCXO, начиная от таких базовых параметров, как вычисление ошибки настройки OCXO и погрешности измерения. (см. EXTINT0)
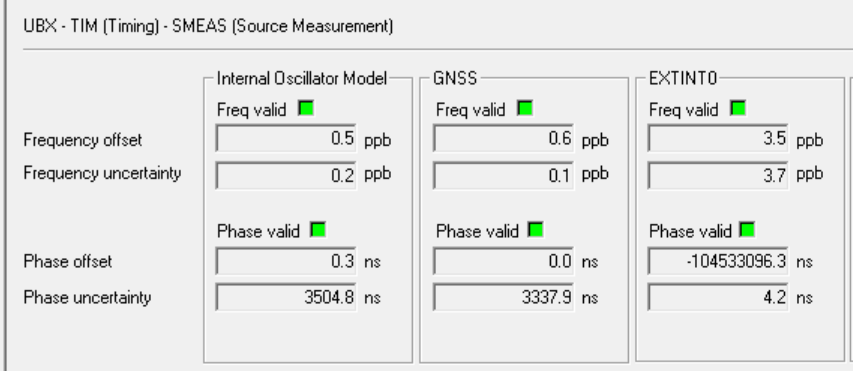
До кучи других показателей.
Основной плюс состоит в том, что этот модуль в отличии от полноценных взрослых GPSDO можно легко интегрировать в мой калибратор, и он обеспечит заведомо высокую и контролируемую стабильность и точность. А кварц при этом не нужно будет подстраивать.
Эпизодически я получаю вопросы вида “зачем ГЛИН-у такая точность времени?” Я уже много раз объяснял на EEVBLOG, но похоже народ тугой просто пиздец как… объясняю последний раз, и на этот раз по русски, надеюсь дойдет:
- Стабильность блока ИОН планируется в районе 0.1…0.3ppm, за цикл синтеза.
- Линейность и стабильность ЦАП, АЦП и фронтенда планируется в районе 0.1…1.0ppm, за цикл синтеза.
- Это значит, что для того чтобы синтез не пострадал, и к синтезируемой функции не добавилась еще одна весомая нестабильность, то нестабильность и точность блока времени должна быть значительно лучше всех предыдущих, чтобы ее вклад был пренебрежимо мал, особенно с учетом того, что реализовать это очень просто, в то время как к примеру задача выжать еще немного и улучшить аналоговый блок уже потребует титанических усилий.
Так-же я в самом начале проекта уже писал, что калибратор планируется как “исследовательский”, способный за счет своей уникально высокой стабильности синтеза ЛИН, проводить исследование свойств конденсаторов и измерять параметры их стабильности и прочие изыски.
Иностранные лаборатории давно просекли эту фишку, и разрабатывают свои генераторы с параметрами значительно превосходящими требуемые для целей калибровки электрометра. Благодаря чему, могут проводить весьма любопытные прикладные эксперименты с диэлектриками.
Про антенну.
Самодельная активная антенна, на удивление хорошо заработала. Повесил ее на мачту рядом с Symmetricom reference L1 GPS. Смотрится… хм…. футуристично!!!

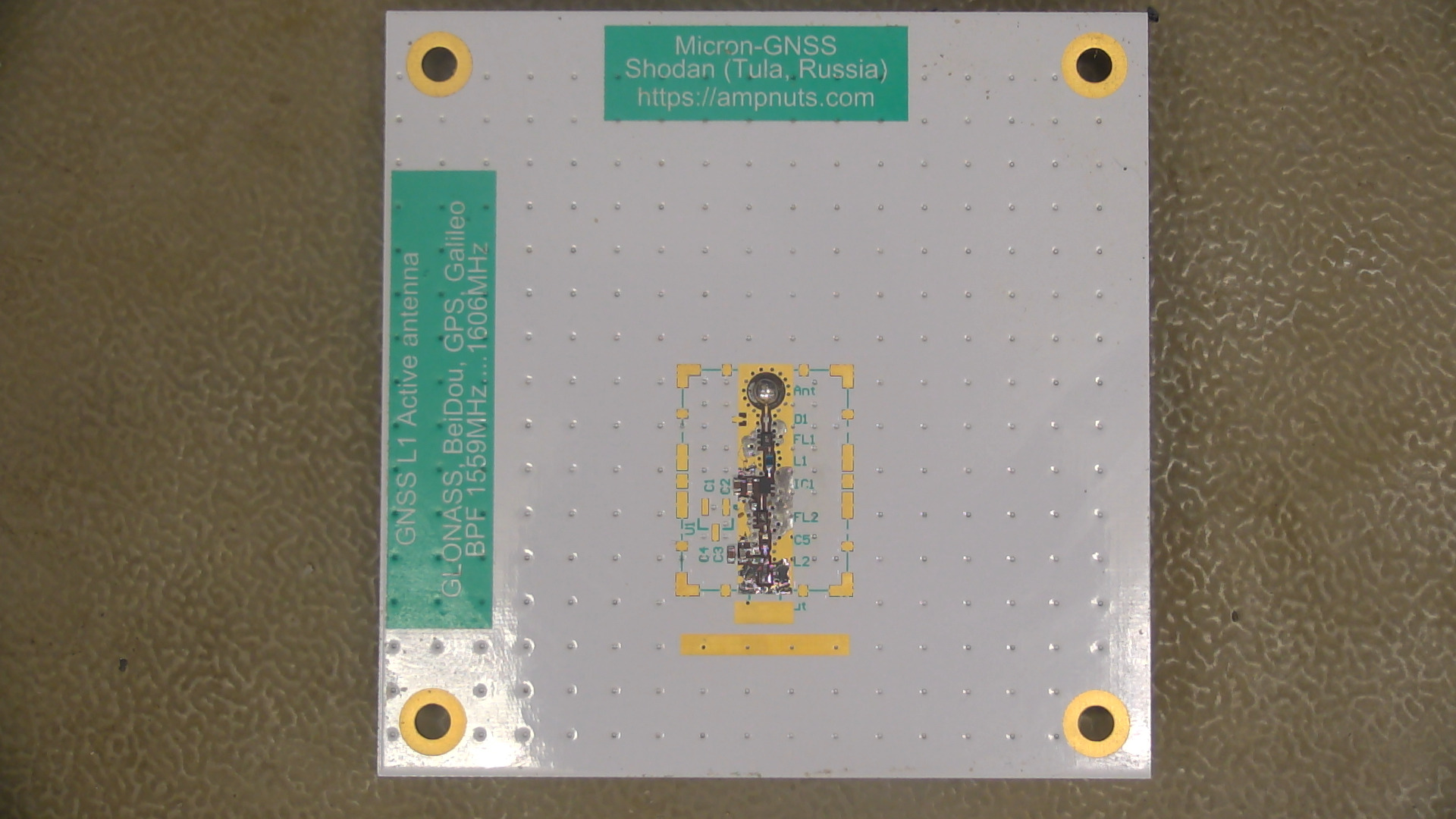
(допаял позже еще пару деталек, но экран ставить не стал)

Как выясняется, не все понимают зачем антенны делают активными(короче с усилителем). Поясняю. Это делается не для того, чтобы усилить сигнал спутников и прокачивать им приемник, а для того, чтобы компенсировать хотя-бы частично потери в фильтрах и кабеле. Современные модули отлично работают и с обычной пассивной антенной. Но вот когда эту пассивную антенну начинаешь обвешивать SAW-фильтрами и приделывать к ней кабель, чтобы дотянуть ее с балкона до лаборатории, то образуется потеря, которую надо компенсировать.
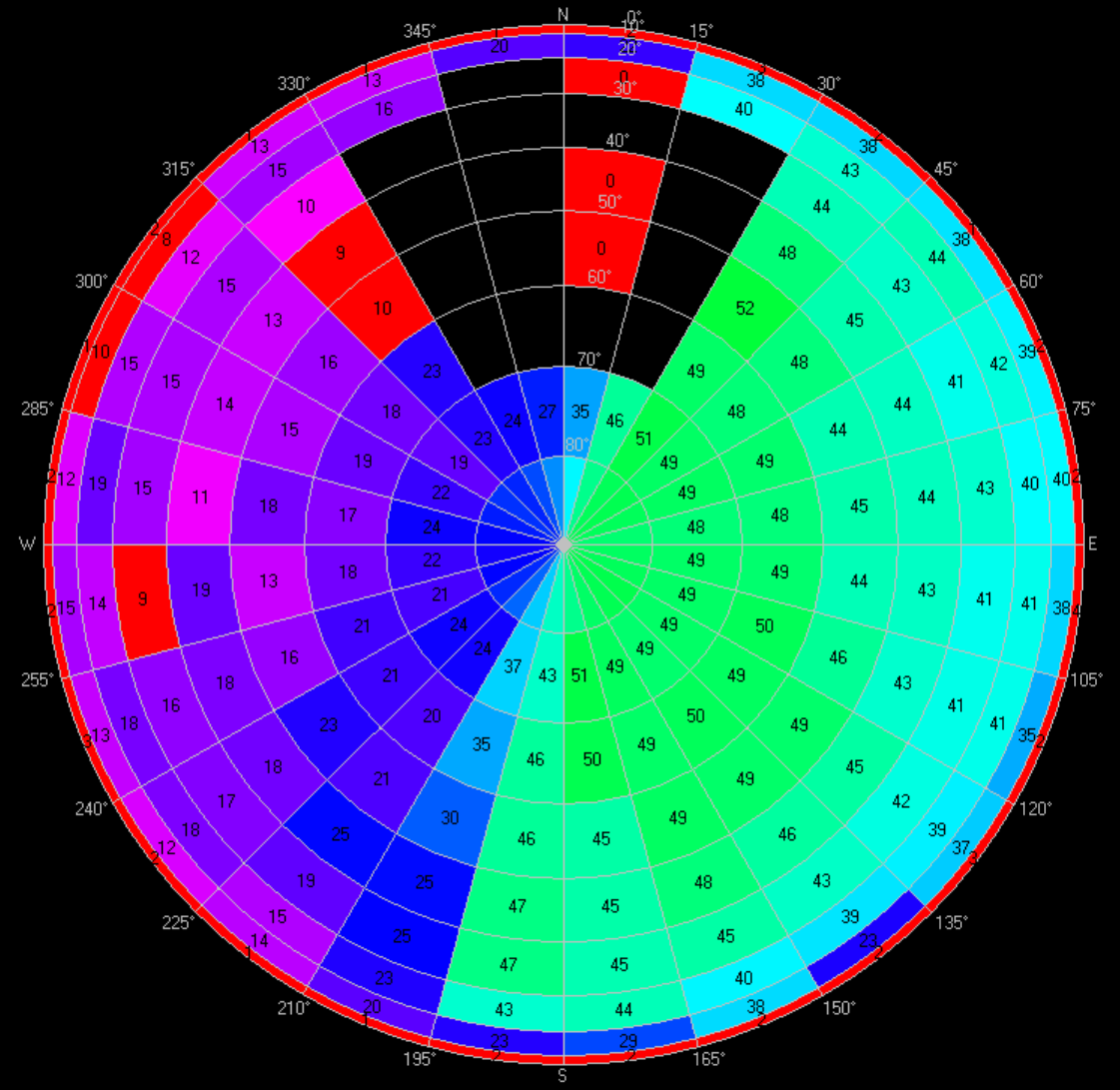
По сравнению к классической активной patch-антенной, без SAW-фильтров, выигрыш виден.
Классическая активная patch-антенна:

Micron-GNSS в тех-же условиях и в то-же время:

Не скажу что выигрыш большой, но он есть.
Встроенный корректор мощности сигнала AGC, говорит, что каскады ВЧ фронтенда у модуля не перегружены, и работают оптимально, как и оптимален уровень шума.

Все это, говорит мне, что в дизайне больших проблем нету.
Резюмэээ:
Готов еще один опорный модуль последней(финальной) версии калибратора. Шумовая картина далека от идеала, но по моему все-равно получилось классно. По крайней мере поставленные задачи он выполнит “на ура” обеспечив собственный внутренний референс частоты, причем само-тестируемый. А чувствительность приемника нового поколения просто поражает. Приятно радует и то, что для выхода на режим с холодным стартом, ему нужно всего 2-3 минуты, что по сравнению с взрослыми GPSDO просто феноменальная сверхсветовая скорость.
Применять UBLOX LEA-M8F имеет смысл с низкокачественными OCXO на базе кристаллов с AT-срезом. Кристаллы с SC-срезом под дисциплинированием этим модулем теряют все свои преимущества.
Все измерения проводились с помощью частотомера Keysight 53220A, к которому в качестве референса частоты подключен GPSDO HP Z3805A, как наиболее точная и стабильная опора в моей лаборатории. Параметры которого многократно превосходят исследуемый объект.
Позже засяду за проектирование следующего модуля, скорее всего аналогового. Цифровой блок на базе Zynq я пока продумываю….