
 После восстановления скоропостижно скончавшихся ОУ в ГЛИНе первой версии, эксперименты по линеаризации ЛИН-а были продолжены. Пришлось правда изрядно повозится с математикой, чтобы из ошибки INL высчитать коэффициенты коррекции скорости ЛИН. Но идея взлетела, удалось научится вычислять поправочные коэффициенты полинома и загружать их в Микрон-ГЛИН.
После восстановления скоропостижно скончавшихся ОУ в ГЛИНе первой версии, эксперименты по линеаризации ЛИН-а были продолжены. Пришлось правда изрядно повозится с математикой, чтобы из ошибки INL высчитать коэффициенты коррекции скорости ЛИН. Но идея взлетела, удалось научится вычислять поправочные коэффициенты полинома и загружать их в Микрон-ГЛИН.
Не могу сказать что результат ошеломляюще хорош, но стало значительно лучше.
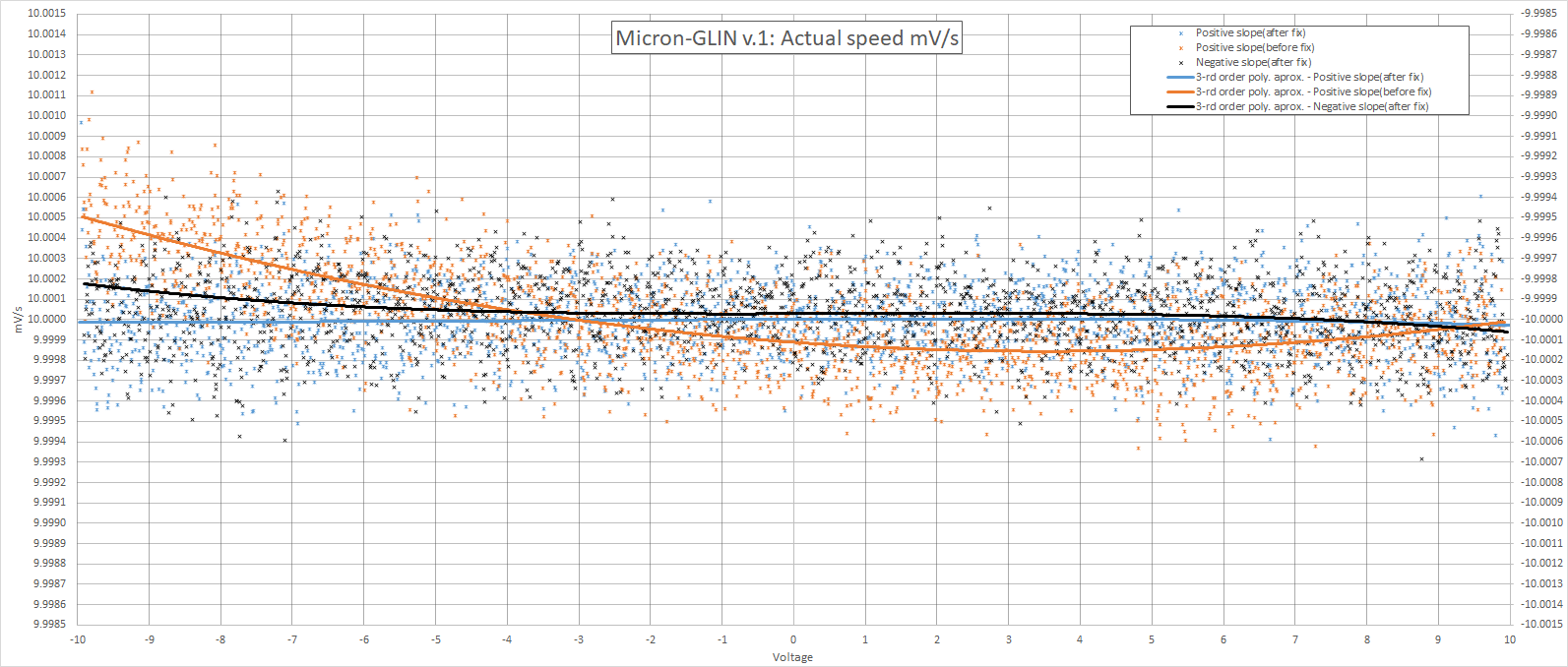
По графику видно, что тот “хвост” который сильно загибал вверх, в значительной степени был уменьшен.
Направление по которому вычислялись коэффициенты линеаризации(+10mV/s) компенсировано практически “в ноль”. Обратное направление(-10mV/s) в значительной степени улучшилось. Да и в целом отклонения стали куда меньше. Я около дня гонял приборчик, и с уверенностью скажу, что его линеаризация по Agilent 34410 понижает ошибку скорости до 0.002%. Эта-же картина наблюдается и на контрольном Keithley DMM6500, но с него данные не даю, т.к. он значительно более шумный зараза!
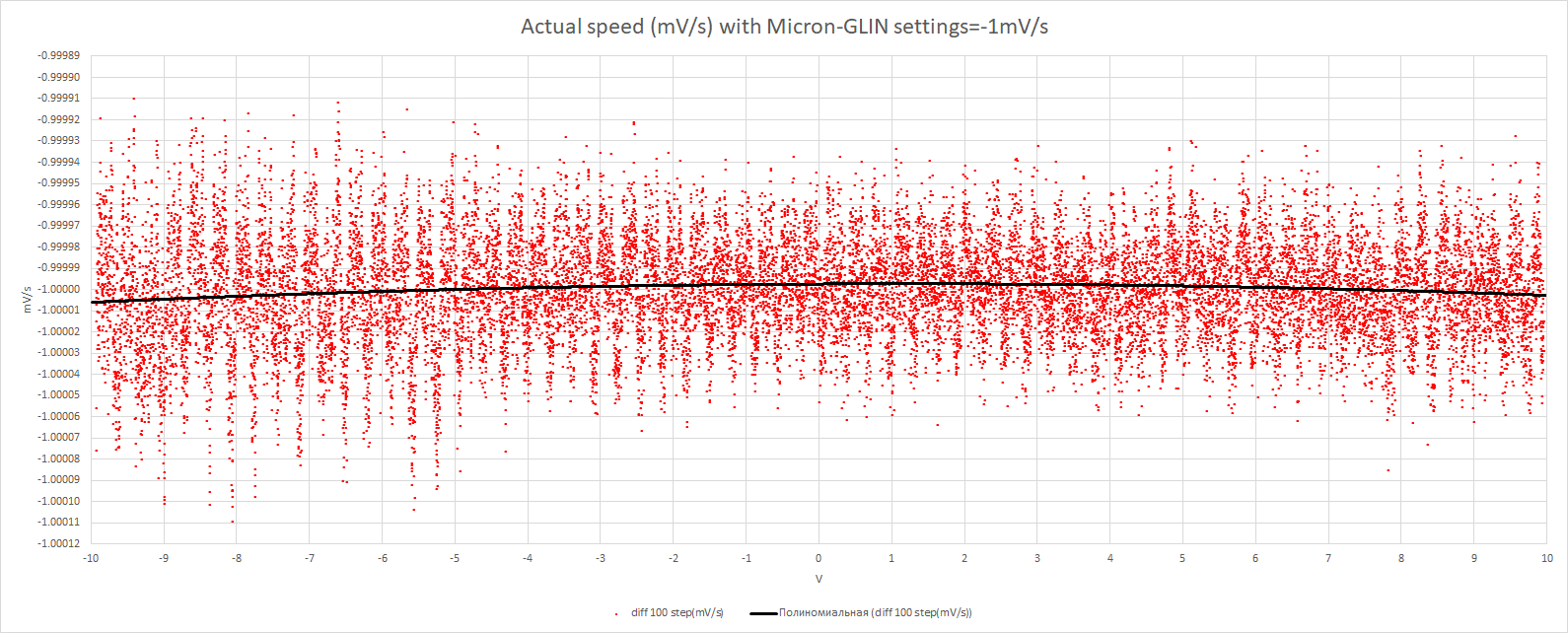
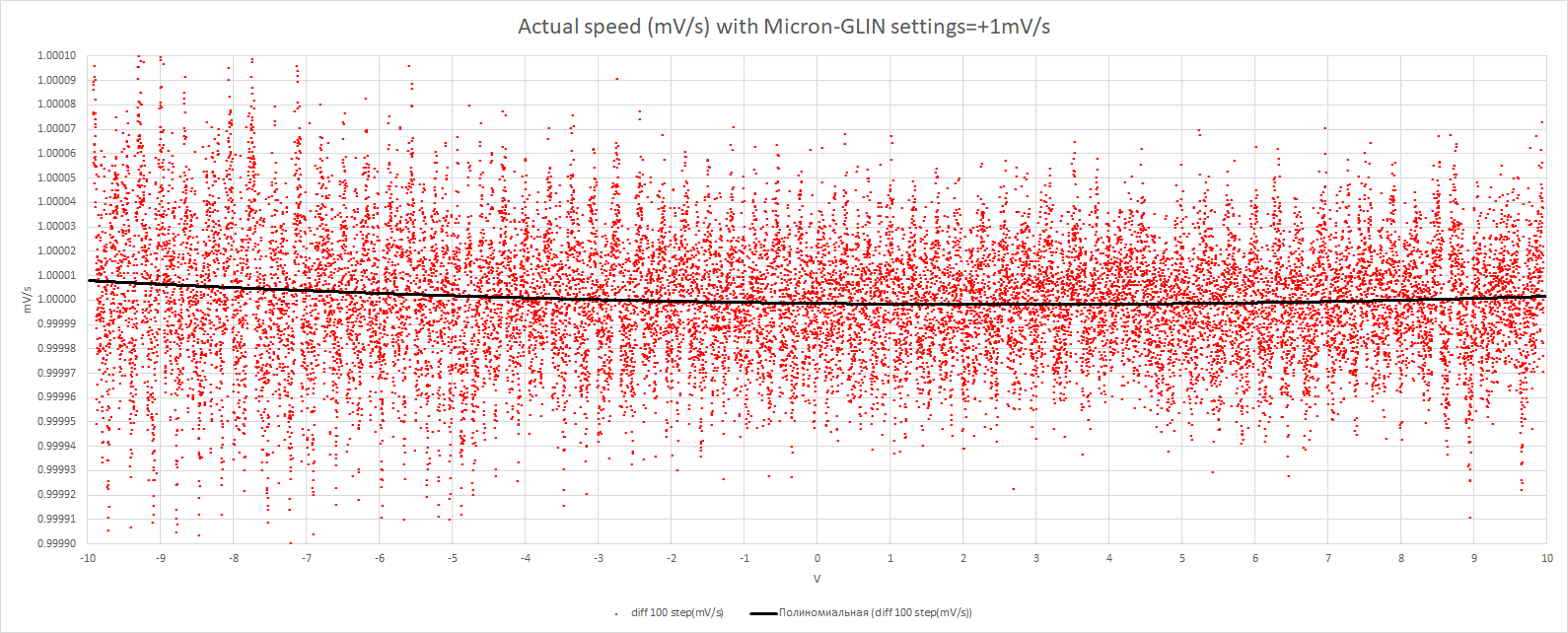
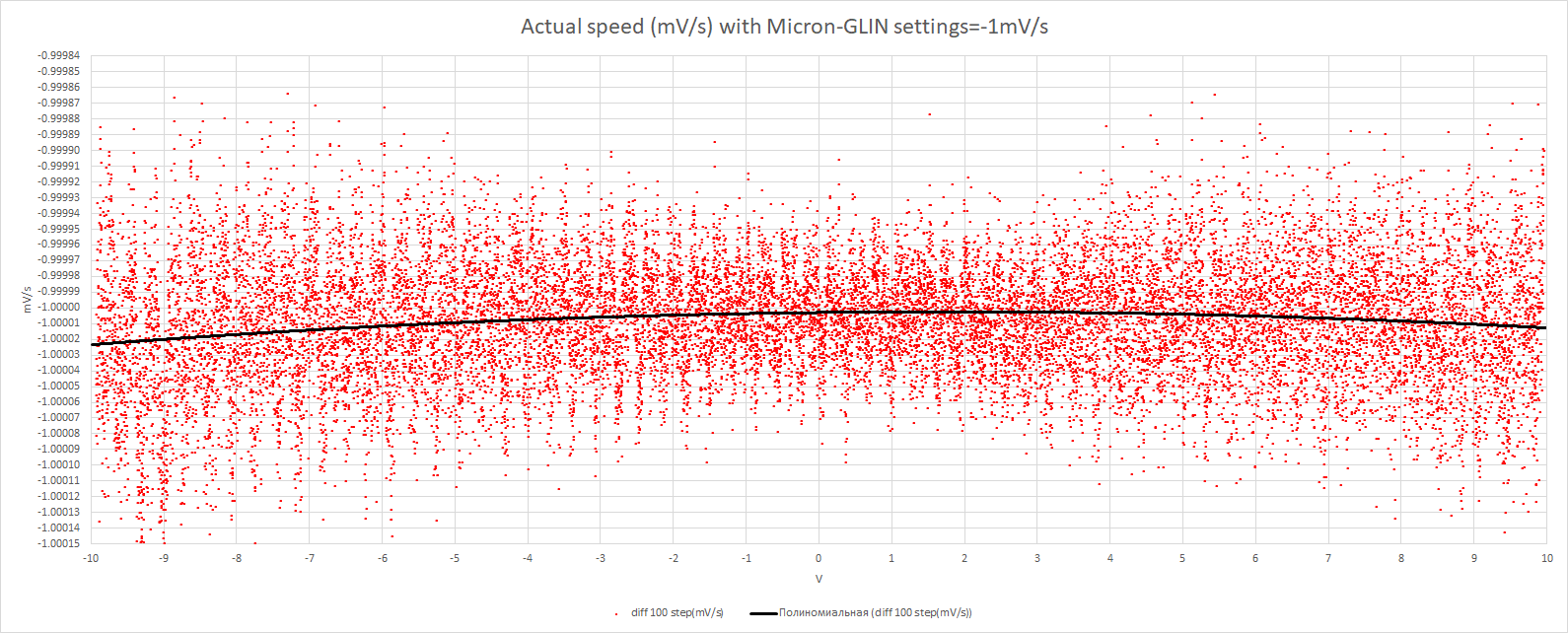
После еще суток тестов, были составлены графики скорости +1mV/s и -1mV/s, на них так-же наблюдается позитивный эффект линеаризации.
До линеаризации:

После линеаризации:
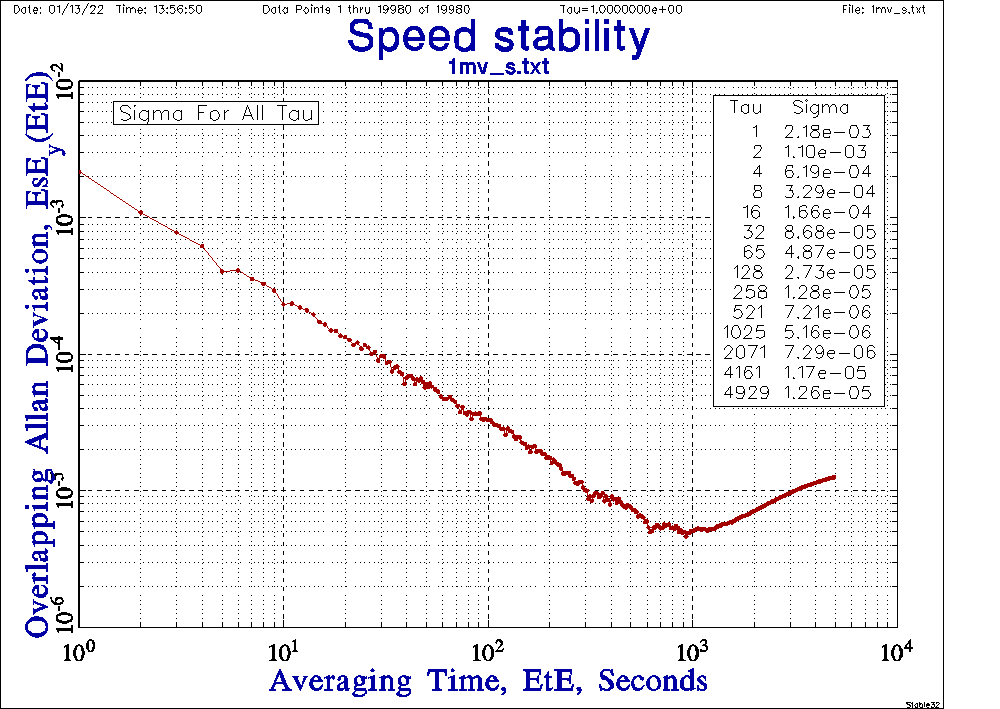
Что характерно, теперь после линеаризации моих приборов уже явно недостаточно для вычисления нестабильности скорости. Это отчетливо видно и на графике девиации Аллана:
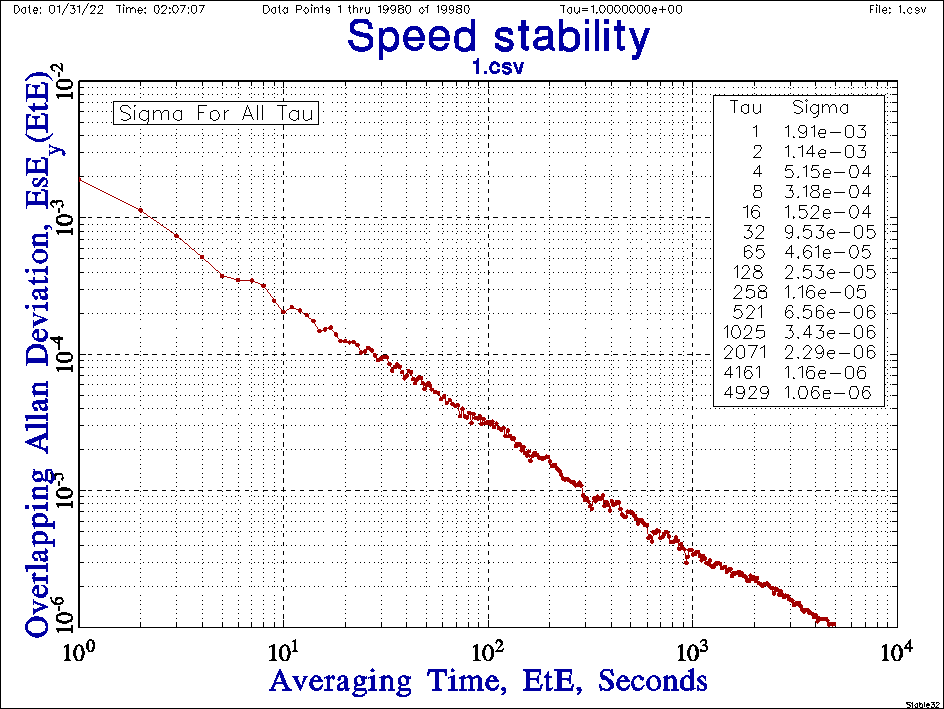
Он начал прошибать границу в 1 ppm, и фактически отображает только шумы измерительного прибора. Напомню, что до линеаризации он выглядел так:
Поскольку существует вероятность, что я скомпенсировал нелинейность самого примененного мультиметра, то для контроля был применен мультиметр Keithley DMM6500 с гарантированной нелинейностью менее 1 ppm, а типичные данные нелинейности этих приборов выглядят следующим образом:
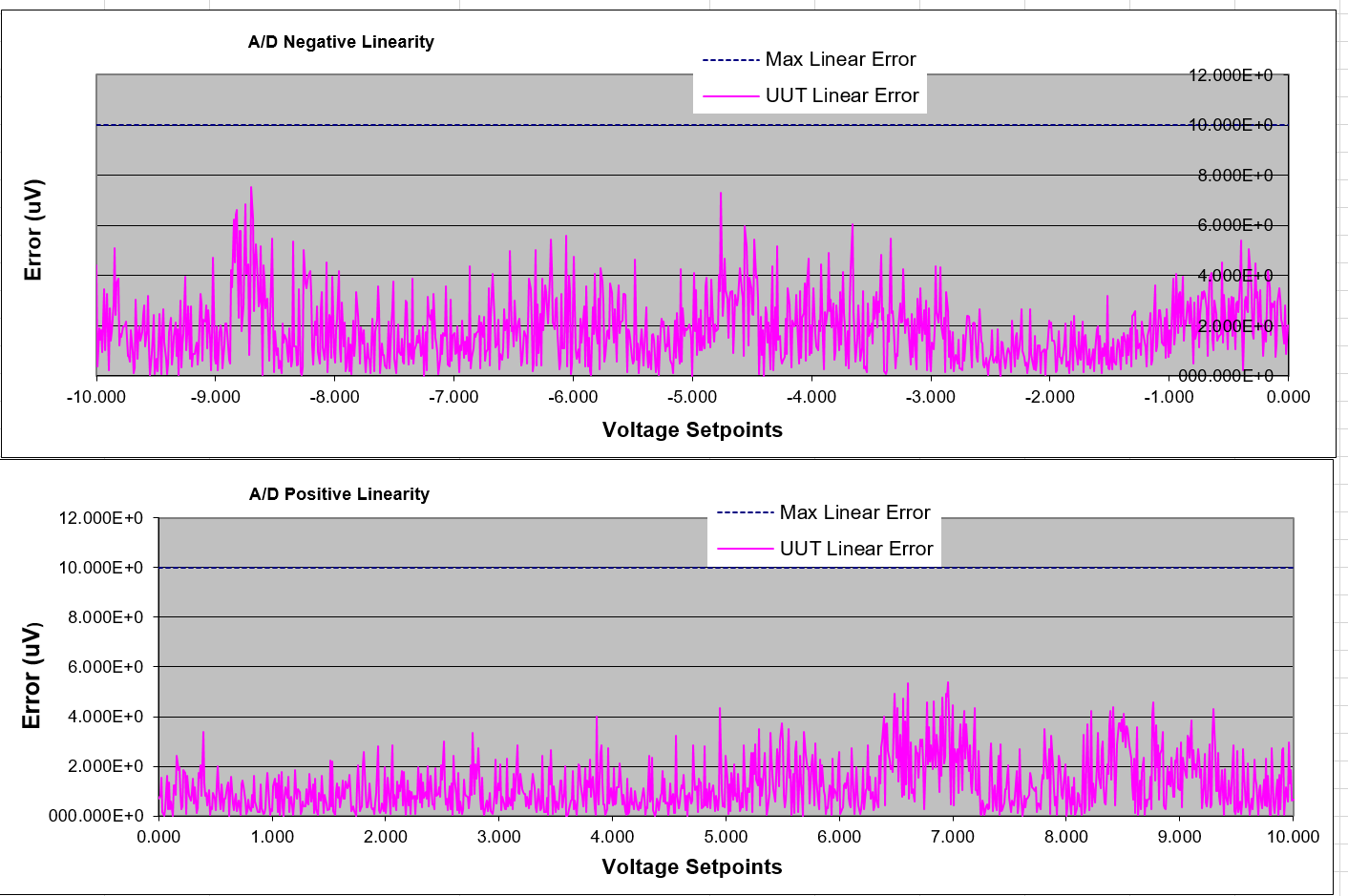
Он конечно шумнее 34410, но как контрольный прибор, вполне еще годен. Так вот… замер показал, что оценки ошибки скорости верны.
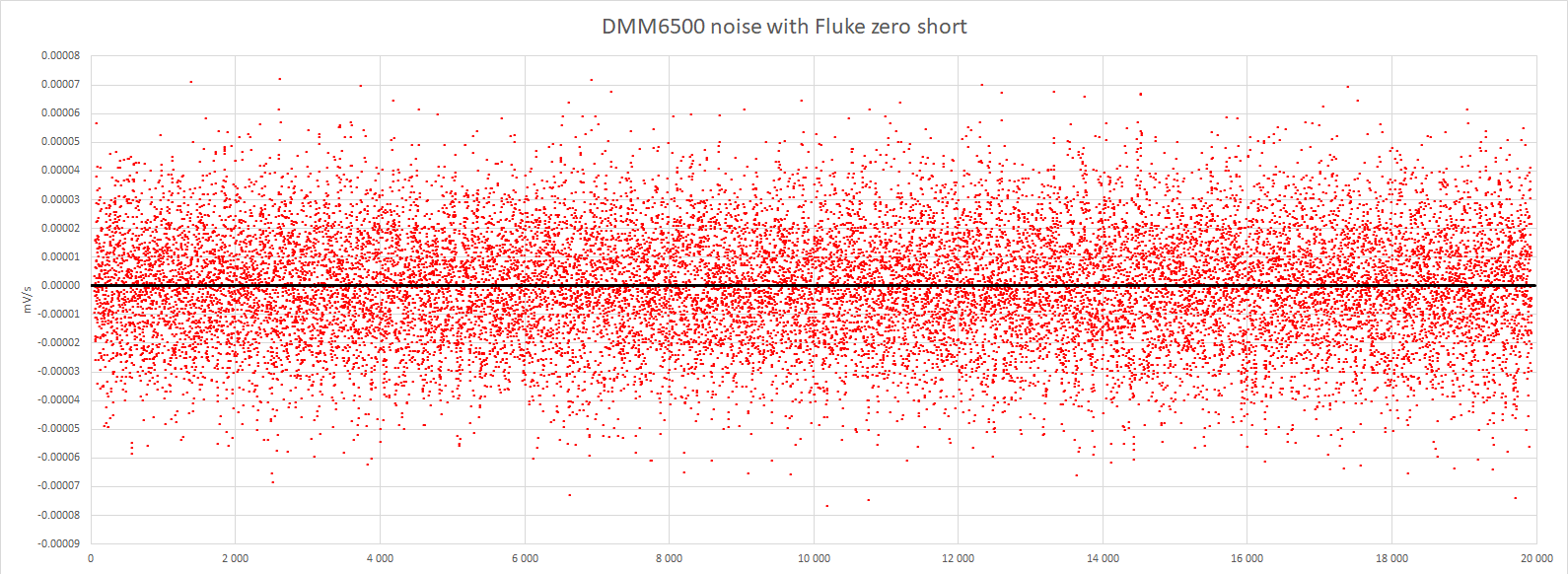
Для справки привожу график шумов с заглушенным входом мультиметра.
Вывод: Применение DDS для небольшой линеаризации скорости, позволяет понизить ошибку воспроизведения скорости в 2-8 раз. А благодаря тому, что при загрузке нового значения FTW изменение синтезируемой частоты происходит без остановок и скачков фазы, то этот метод не делает разрыва в ЛИН. Момент загрузки нового FTW хорошо иллюстрирует картинка выдранная из аппнота Analog Devices:
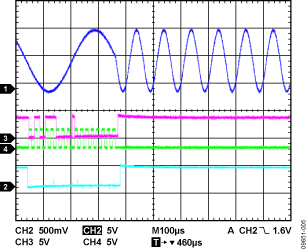
А поскольку коррекция делается каждые 0.5 секунд и небольшими порциями, то скачка ЛИН-а вообще не происходит, он плавно корректирует свою скорость и все.
Помнится мне, когда я публиковал идею этого проекта год назад на EEVBLOG, меня всячески там отговаривали применять DDS. Если-бы я их послушал, я-бы никогда не вышел-бы не только на такие точности скорости, но и не смог-бы производить дополнительную линеаризацию. Короче говоря – никогда никого не слушайте!!!! Думайте и делайте только сами! Так как задумано, а не так как посоветовали (не?)доброжелатели.